





Các nhà sản xuất ô tô đã rơi vào tình trạng khan hiếm linh kiện điện tử, mặc dù xu hướng ô tô thông minh là không thể cưỡng lại. Là bằng chứng tức thời và ấn tượng nhất về sự thông minh đối với người dùng, hệ thống PEPS (Nhập cảnh bị động và Khởi động bị động) không còn là một tính năng cao cấp chỉ dành cho những chiếc xe cao cấp. Nó đã được nhiều nhà sản xuất ô tô, các thương hiệu mới nổi nói chung giới thiệu đến các mẫu xe hạng trung hoặc thậm chí tiết kiệm. Tại thị trường Trung Quốc, nơi doanh số bán xe điện tăng trưởng hơn 100% trong nửa đầu năm 2022, các nhà sản xuất ô tô điện lớn như BYD, GAC Aion, Geely, Nio, Xpeng và Li Auto về cơ bản đã trang bị PEPS cho tất cả các mẫu xe .

Trong khi ECU đó lặng lẽ gây choáng váng cho những người lái xe chúng ta, chúng ta đã bao giờ nghĩ đến việc thăm dò dấu vết chế tạo nó và viễn cảnh tương lai của nó chưa? Lên đường thôi.
PEPS cung cấp cho người lái xe trải nghiệm vào xe một cách an toàn mà không cần hoạt động mở khóa thủ công. Động cơ và hệ thống HVAC của xe có thể được khởi động từ xa trước khi người lái hoặc hành khách bước vào xe. Trong khi tất cả hành khách rời khỏi xe, PEPS sẽ tự động khóa xe. Bằng cách này, người sử dụng xe hơi được hưởng sự tiện lợi khi ra vào thụ động với sự đảm bảo về an ninh. Đó hẳn là lý do tại sao chúng tôi đặt tên cho nó bằng từ “bị động”.
Hôm qua: RKE và PKE
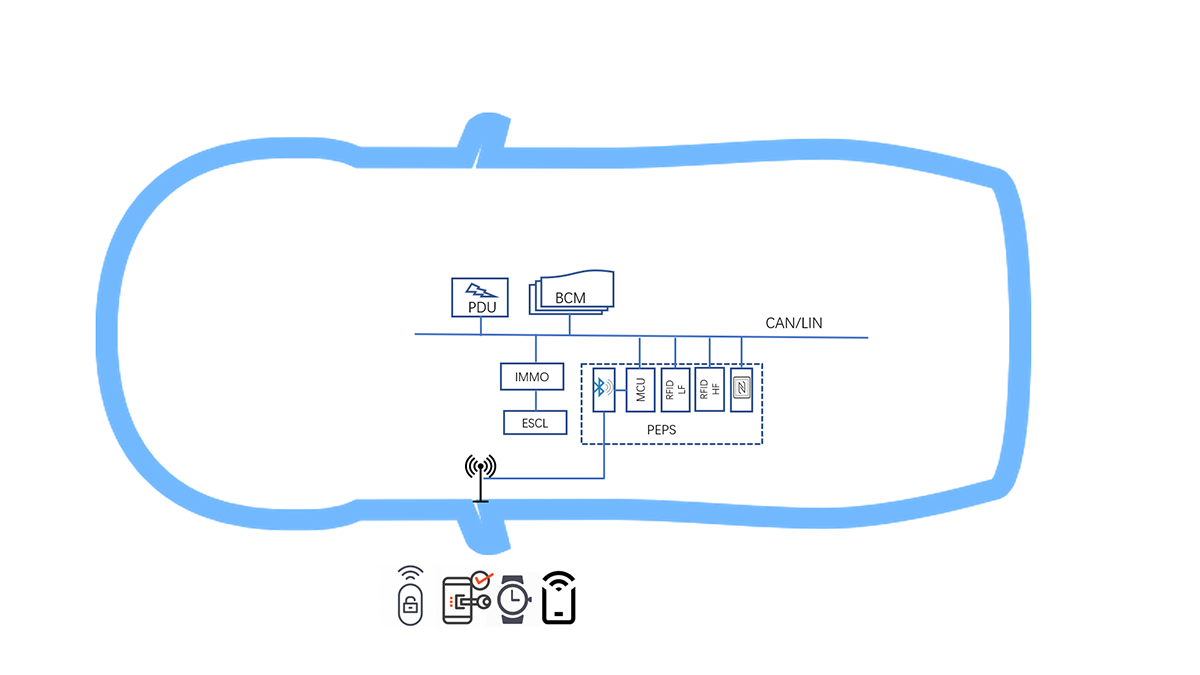
Hiện tại, các giải pháp PEPS chủ đạo tích hợp các công nghệ không dây như Bluetooth Low Energy (BLE), NFC, RFID (Tần số cao và Tần số thấp), v.v. Vậy, chúng hoạt động như thế nào? Sẽ thật khó để tiêu hóa nếu chúng ta kể câu chuyện vào ngày hôm nay. Vì vậy, tại sao chúng ta không quay lại ngày hôm qua?
Vào cuối những năm 1990, một số mẫu ô tô cao cấp đã sử dụng hệ thống nhập cảnh không cần chìa khóa từ xa (RKE), một sự tiến hóa so với giải pháp IMMO (bộ cố định) trước đó dựa trên RFID tần số thấp (125KHz). Là phiên bản tiền nhiệm của PEPS, RKE có chìa khóa để truyền tín hiệu UHF (tần số siêu cao) tới một bộ thu RF được kết nối với BCM (mô-đun kiểm soát thân xe) của ô tô để xác minh danh tính người dùng. Sau khi ID được xác minh, hệ thống sẽ thực hiện hành động đóng / mở cửa do BCM điều khiển. Cơ chế xác minh một chiều như thể hiện trong Hình 1 có thể được hiểu như một mật mã được thiết lập trước trong một bộ phim gián điệp. Khi một mật vụ đến thăm địa điểm họp, anh ta hoặc cô ta phải nói hoặc hiển thị một mật mã như vậy. Nếu mật mã chính xác, người đó sẽ được phép vào. Hạn chế của cơ chế này là một khi kẻ thù xâm nhập và lấy được mật mã,
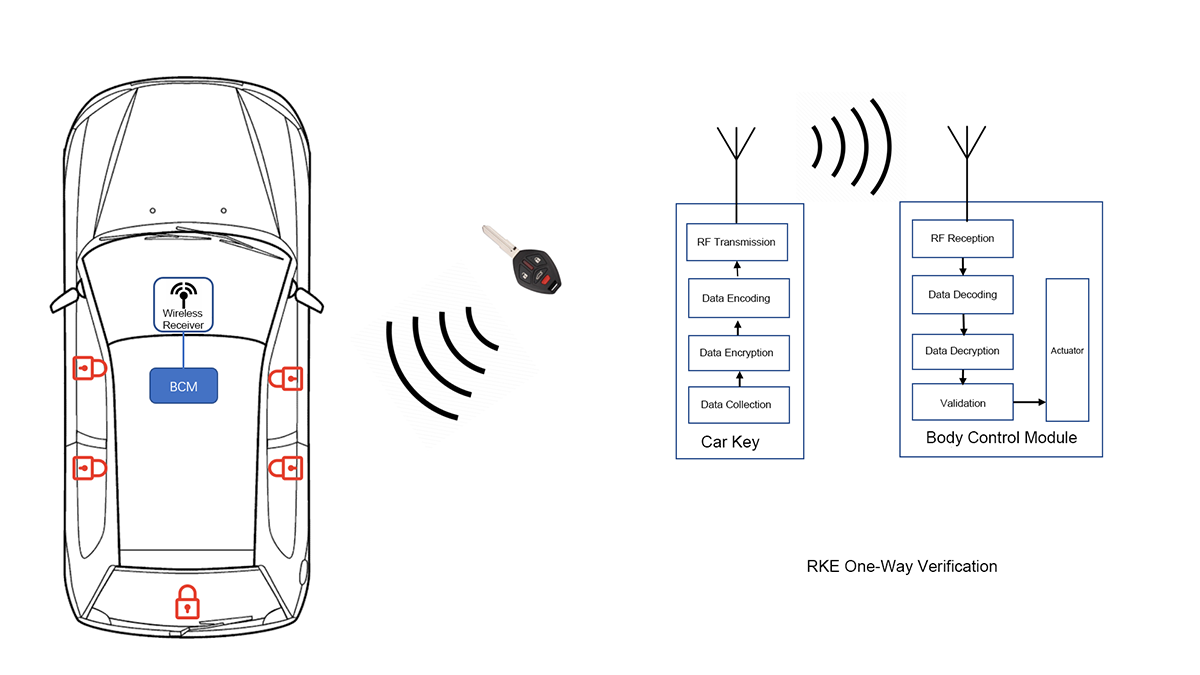
Hình 1. Cơ chế làm việc của RKE
Giải pháp RKE sử dụng các dải tần số 315 MHz (ở Mỹ, Trung Quốc và Nhật Bản, v.v.), 433,92 MHz (ở châu Âu, Trung Quốc) và 868MHz (ở châu Âu). Về điều chế tín hiệu, hầu hết các quốc gia áp dụng ASK (khóa dịch chuyển biên độ ), trong khi Nhật Bản áp dụng chế độ FSK (khóa dịch chuyển tần số). Các nhà cung cấp vi mạch như Silicon Labs, Maxim, Microchip và NXP, v.v. có các dịch vụ trong lĩnh vực này.
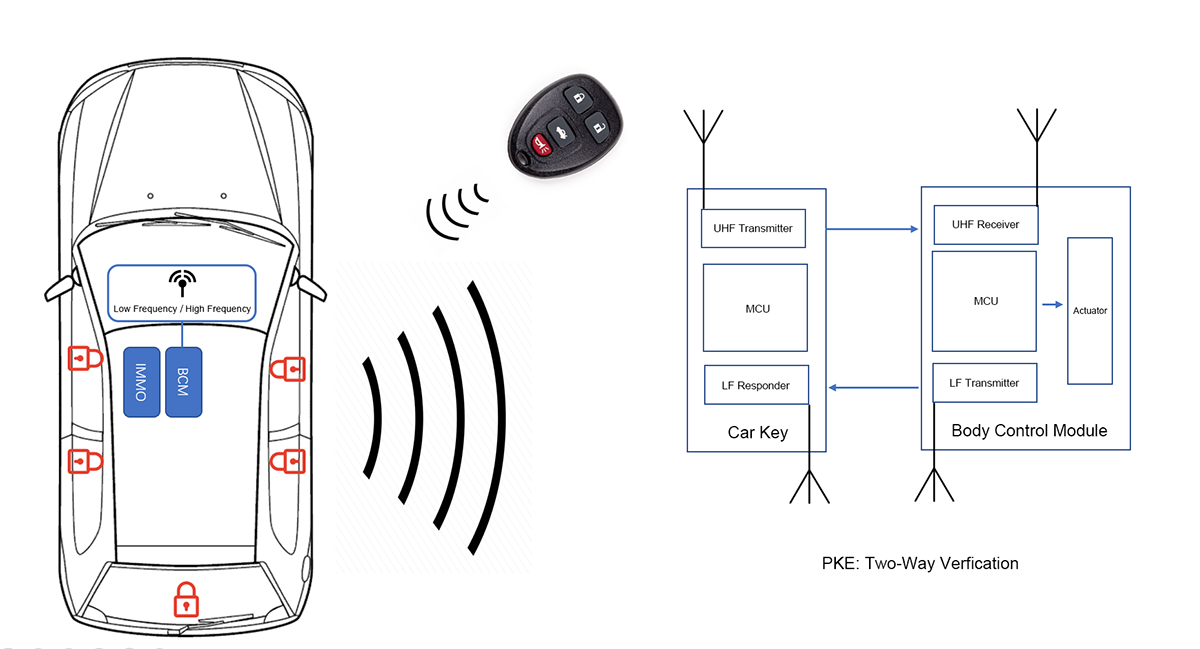
Hình 2. Cơ chế làm việc của PKE
Ngày nay: Bluetooth PEPS là dòng chính
Hình 3. Sơ đồ PEPS Bluetooth ở mức đầu vào (Trạm đơn RSSI)
AOA Technology to Realize Mainstream PEPS
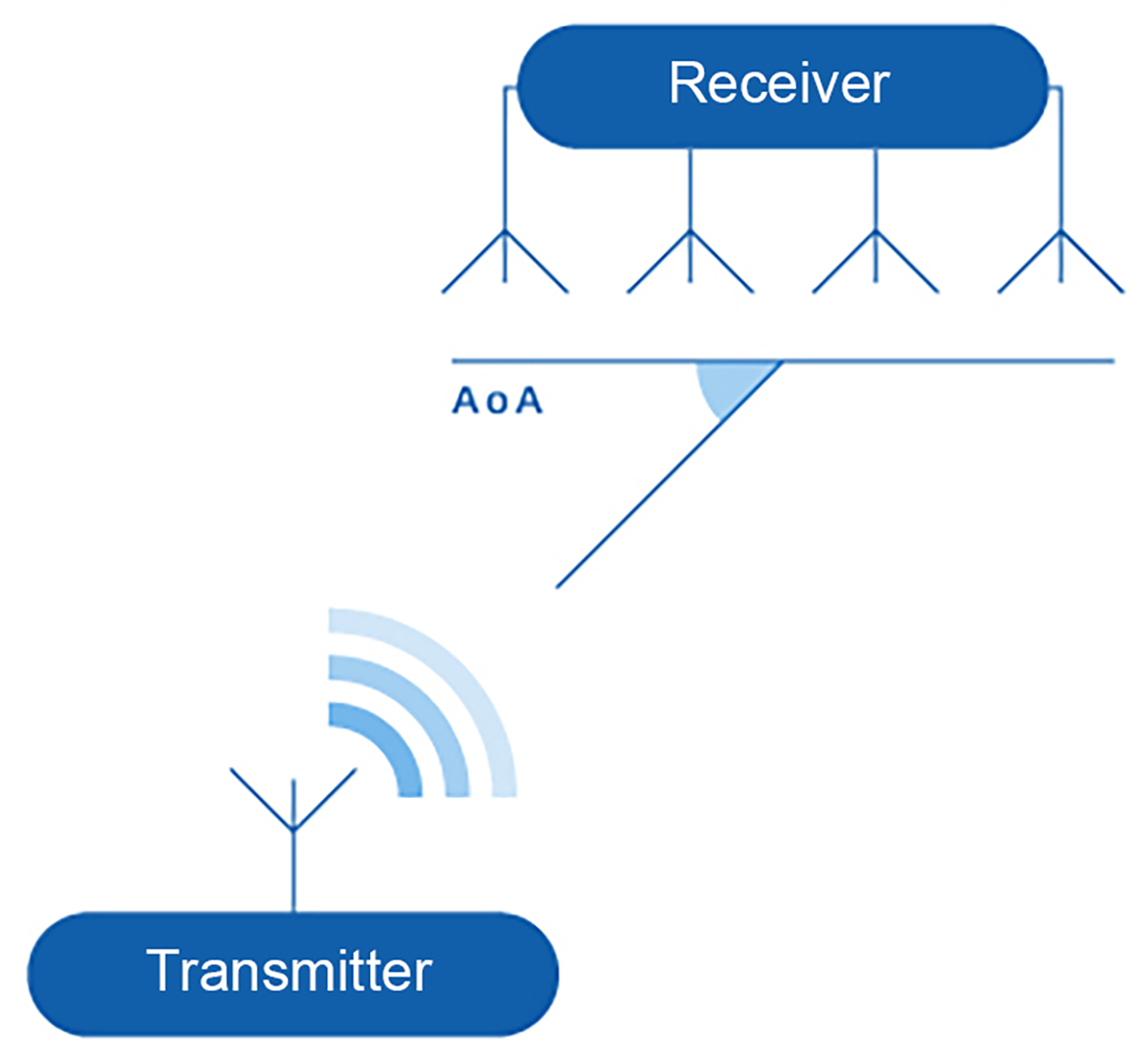
Hình 4. Định vị Bluetooth AOA
Rõ ràng, để cải thiện mức độ chính xác của định vị, chúng tôi cần hỗ trợ của nhiều trạm gốc Bluetooth có thuật toán AoA. Vì vậy, ở các mẫu xe hạng trung, các nhà sản xuất ô tô chọn triển khai Bluetooth PEPS đa điểm như minh họa trong Hình 5, số lượng chính xác các trạm gốc và mô hình bố trí khác nhau ở một mức độ nào đó đối với các mẫu ô tô khác nhau.
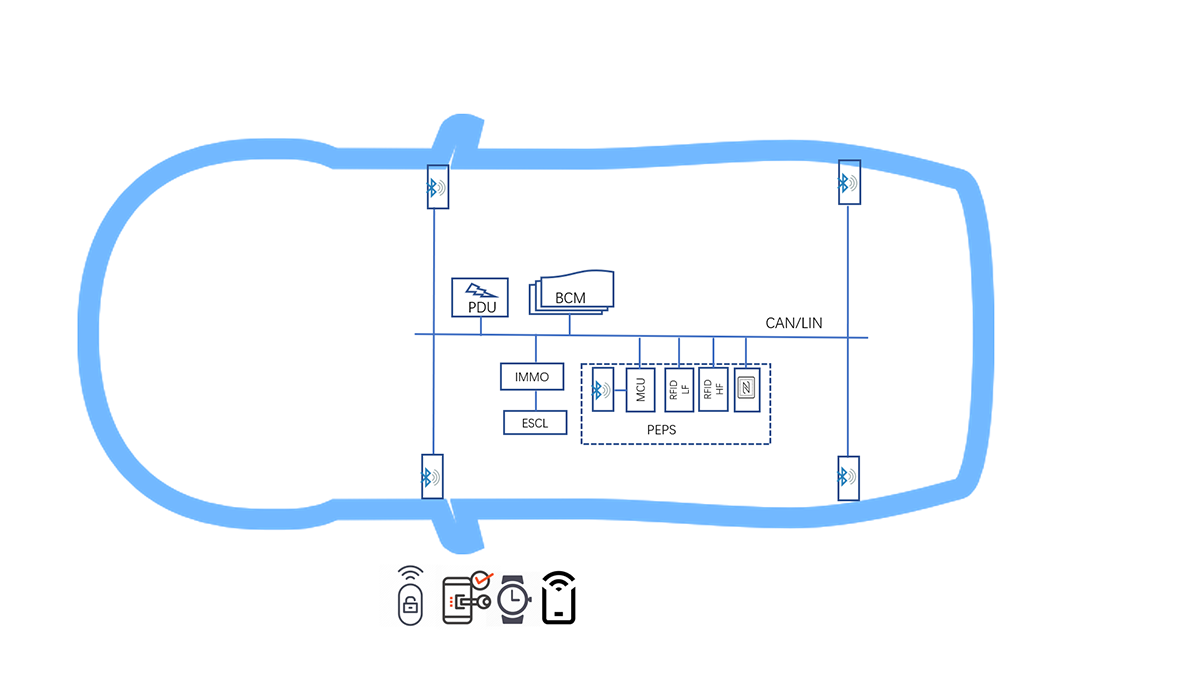
Hình 5.Giải pháp PEPS Bluetooth chính thống (Định vị AoA)
Hầu hết các SoC được thông qua trong lĩnh vực Bluetooth PEPS bao gồm TI CC2640, Silicon Labs EFR32BG22 và NXP KW36, v.v.
Ngày mai: UWB là
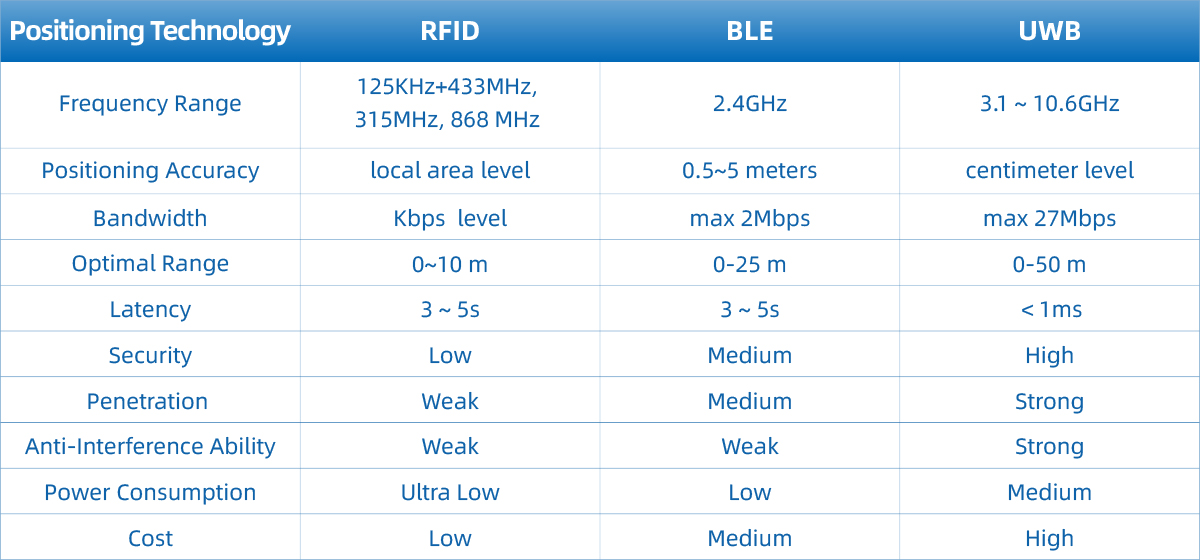
Bảng 1. So sánh các công nghệ định vị PEPS
Các thuật toán định vị cho UWB
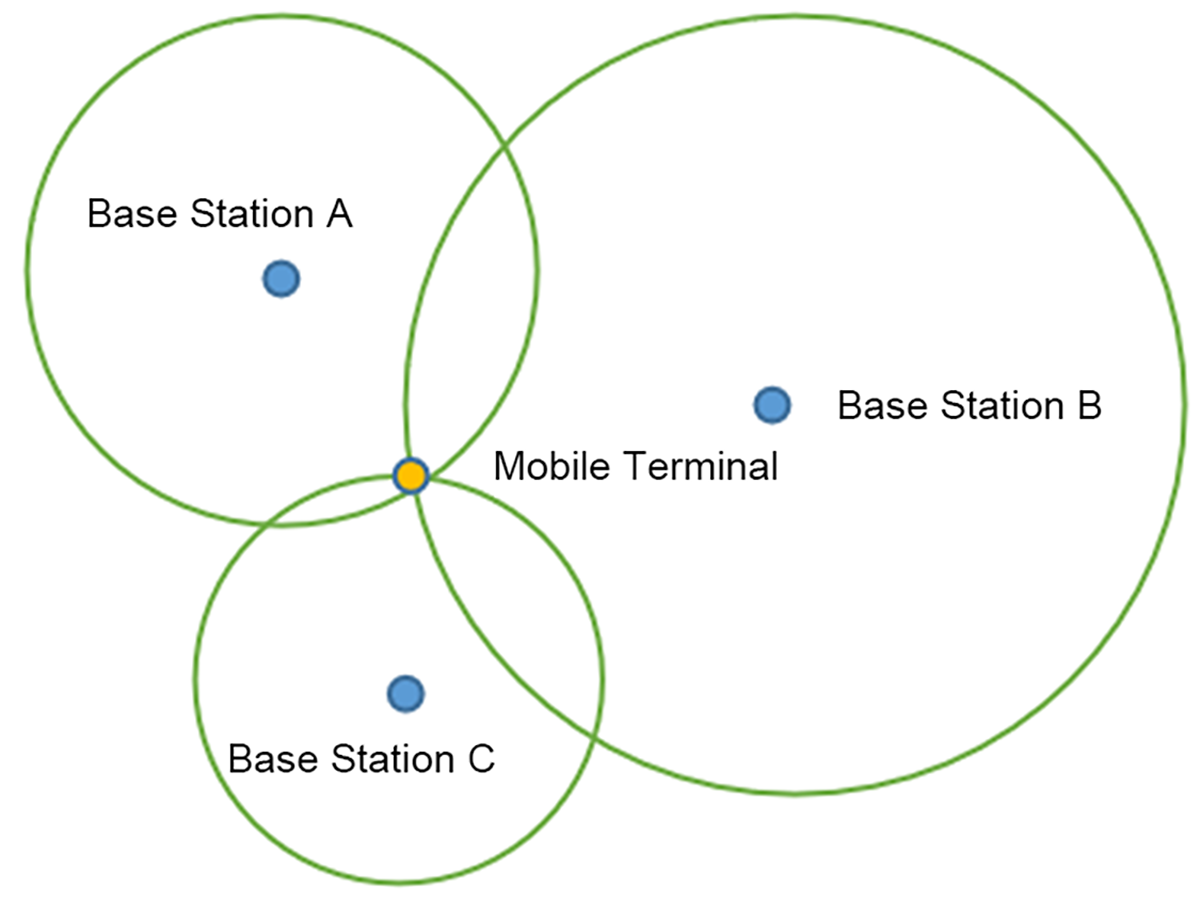
Hình 6. Thuật toán Định vị TOA (Phương pháp Định vị Hình tròn)
Một cải tiến so với TOA, TDOA tiến hành đồng bộ hóa chính xác giữa các trạm gốc, điều này rất dễ nhận ra. Không liên quan đến đồng bộ hóa thời gian giữa thiết bị đầu cuối di động và các trạm gốc, như thể hiện trong Hình 7. Đầu tiên hãy tính toán chênh lệch khoảng cách giữa thiết bị đầu cuối di động và trạm gốc A và một giữa nó và trạm gốc B. Thiết bị đầu cuối di động phải nằm trên một hyperbol với trạm gốc A và trạm gốc B làm tiêu điểm. Một tập hợp các hypebol khác có thể thu được bằng sự chênh lệch khoảng cách giữa thiết bị đầu cuối di động và trạm gốc A và trạm cơ sở C, và giao điểm của các hypebol là vị trí của thiết bị đầu cuối di động. Trong phạm vi không gian của xe, ảnh hưởng của đa đường, tiếng ồn, v.v. cũng có thể được giảm thiểu bằng cách chênh lệch khoảng cách.
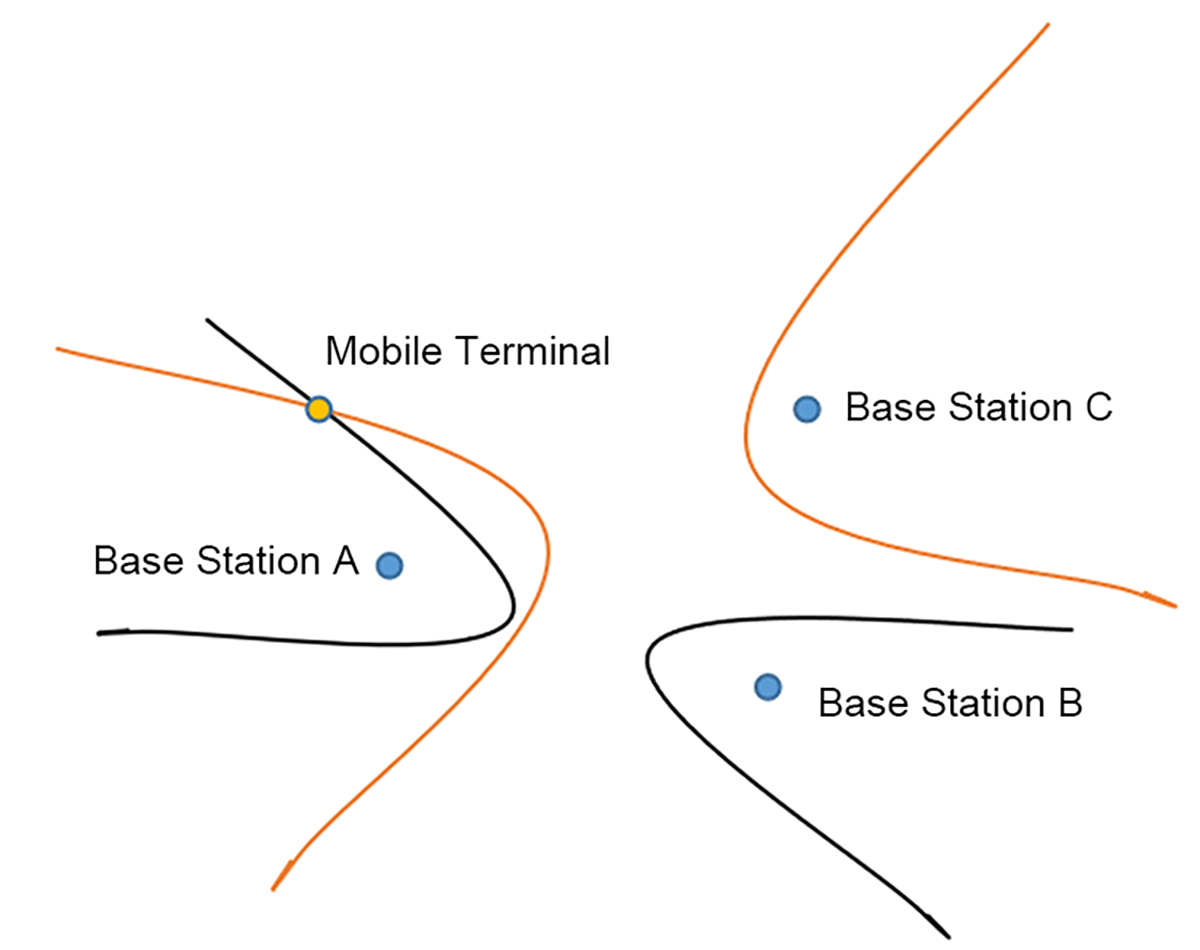
Hình 7 Thuật toán định vị TDOA
Định vị AOA tính toán góc tới dựa trên nguyên tắc lệch pha, và chỉ cần hai trạm gốc để đạt được định vị. Do vấn đề về độ phân giải góc, độ chính xác định vị giảm khi khoảng cách từ trạm gốc tăng lên, và chủ yếu được sử dụng để định vị trong khoảng cách ngắn và trung bình.
Hình 8. Kiến trúc triển khai của UWB PEPS do CCC 3.0 chỉ định
Trong lĩnh vực chip UWB, các nhà sản xuất trưởng thành được công nhận hiện nay là Apple, NXP Trimension và QORVO Decawave. Trong số các IC được phát hành của họ, chỉ có NXP Trimension NCJ29D5 đáp ứng các yêu cầu của quy định về xe.
Phần mở rộng: Bio-Radar
Trải nghiệm của UWB PEPS cho người lái xe vừa thân mật vừa an toàn. Tuy nhiên, những hành khách trên xe có cảm thấy như vậy không? Thường là có, nhưng không trong một số trường hợp đặc biệt. Đôi khi điều đó thật khắc nghiệt đối với họ. Ví dụ, nếu người lái xe ra khỏi xe, cửa sẽ tự động khóa lại. Một em bé hoặc một con vật cưng ngọt ngào đã vô tình bị bỏ lại trên xe. Xe có nên gửi báo động cho người lái xe không? Hoàn toàn cần thiết! May mắn thay, nó có thể được giải quyết tốt bởi UWB.
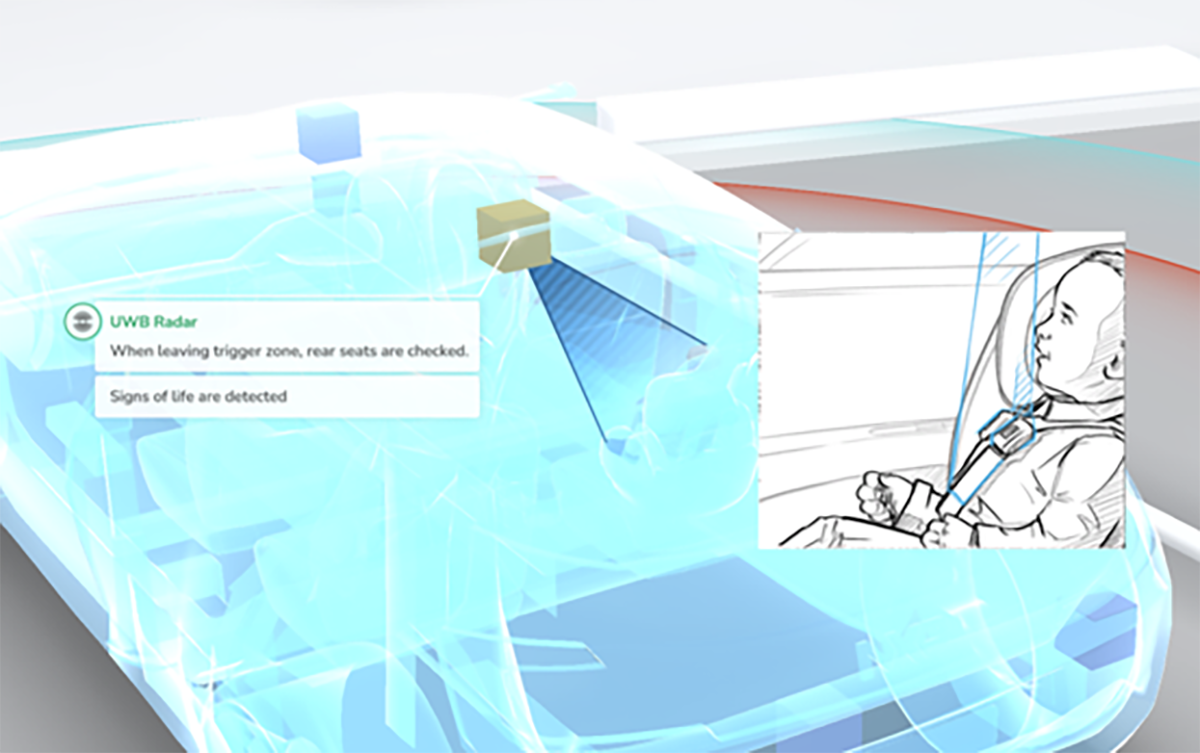
Hình 9. Phát hiện sự sống với UWB Bio-Radar
Thân cây: Kick-to-Open
Ngoài khả năng phát hiện sự sống trong xe, dựa trên tính năng nhận biết chuyển động của radar UWB, UWB còn có một ứng dụng thông minh là dậm chân để mở cốp. Khi danh tính người lái đến đuôi xe, radar UWB có thể phát hiện chính xác hành động dậm chân, từ đó tự động mở cốp xe.
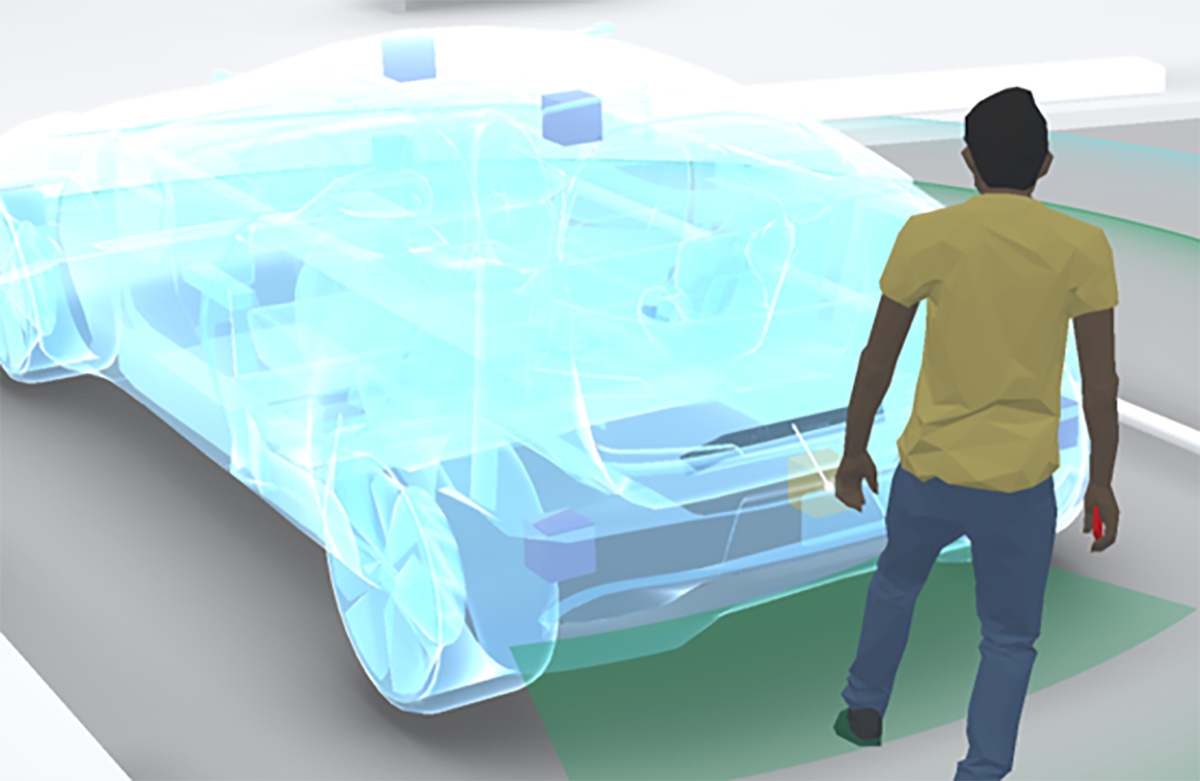
Hình 10. UWB cho phép giải pháp Kick-to-Open
Hai chức năng của radar UWB được mô tả ở trên, bao gồm radar sinh học UWB và radar đá UWB, không yêu cầu phần cứng bổ sung mà chỉ được thực hiện bằng cách tái sử dụng phần cứng UWB phía xe mà không cần thêm chi phí phần cứng bổ sung. Chúng tôi cũng có thể coi chúng là một phần của chức năng UWB PEPS trong tương lai.
Dịch vụ đỗ xe tự động được kích hoạt bởi UWB
AVP (Automated Valet Parking) là chức năng đỗ xe tự động. Nó được biết đến như là công nghệ lái xe tự động cấp độ L4 cung cấp cho người dùng "sự tự do trong quãng đường cuối cùng". Đây hiện là kịch bản ứng dụng lái xe tự hành hứa hẹn nhất để thương mại hóa, như trong Hình 11. Một lợi ích to lớn khác của việc triển khai trải nghiệm PEPS với UWB là nó cung cấp các điều kiện cần và đủ để triển khai AVP bên hông xe.
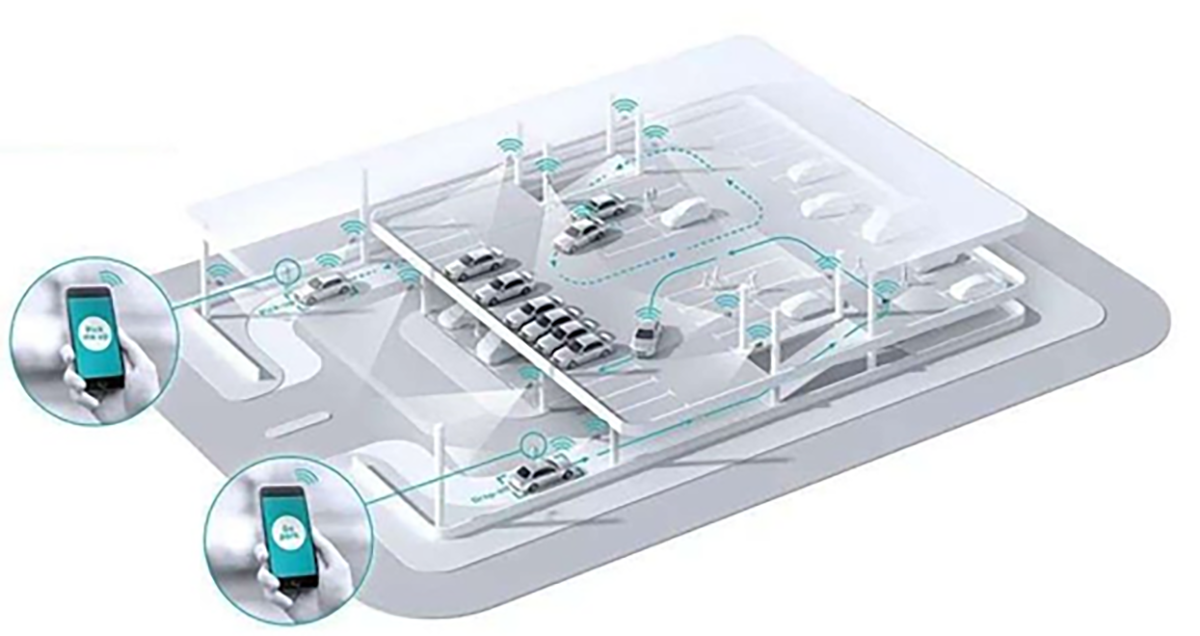
Hình 11 Hệ thống đỗ xe có người phục vụ tự động
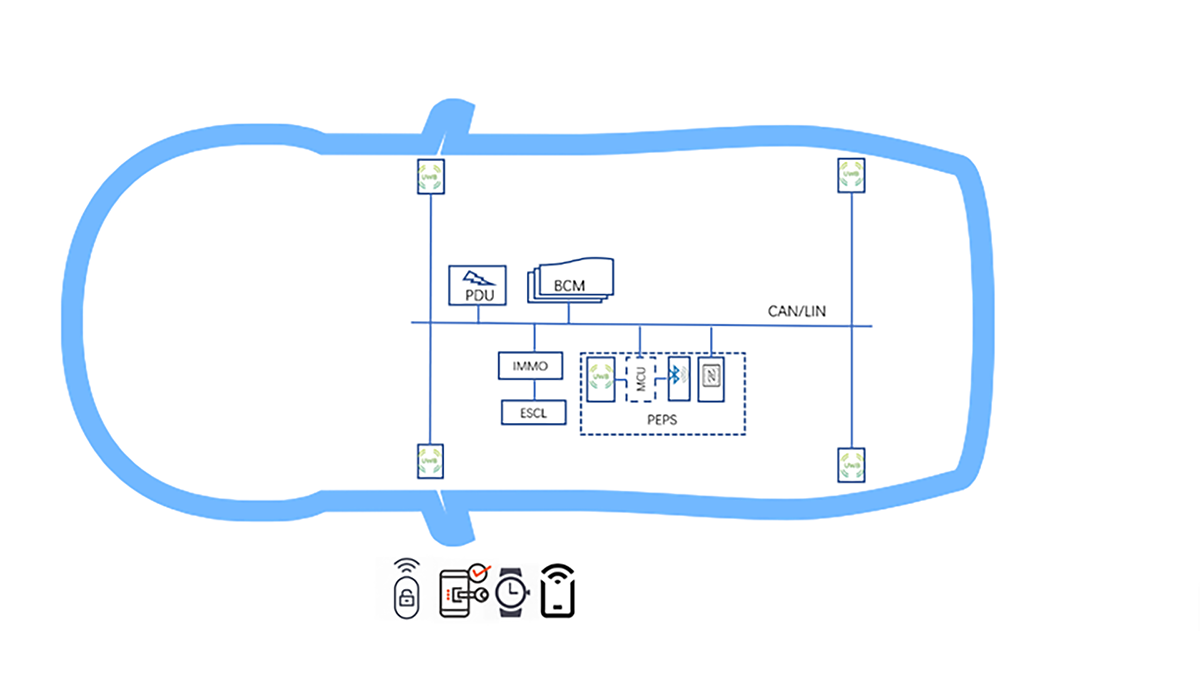
Hình 12 cho thấy một sơ đồ bố trí nút UWB cuối xe khả thi. Tổng cộng có bốn nút UWB PEPS được đặt ở đèn pha và đèn hậu, và nút UWB PEPS + AVP thứ năm được đặt trên nóc xe. Nút thứ năm có thể nhận cả tín hiệu UWB trong xe và tín hiệu UWB bên ngoài xe, đồng thời cũng là nút quan trọng để thực hiện chức năng AVP.
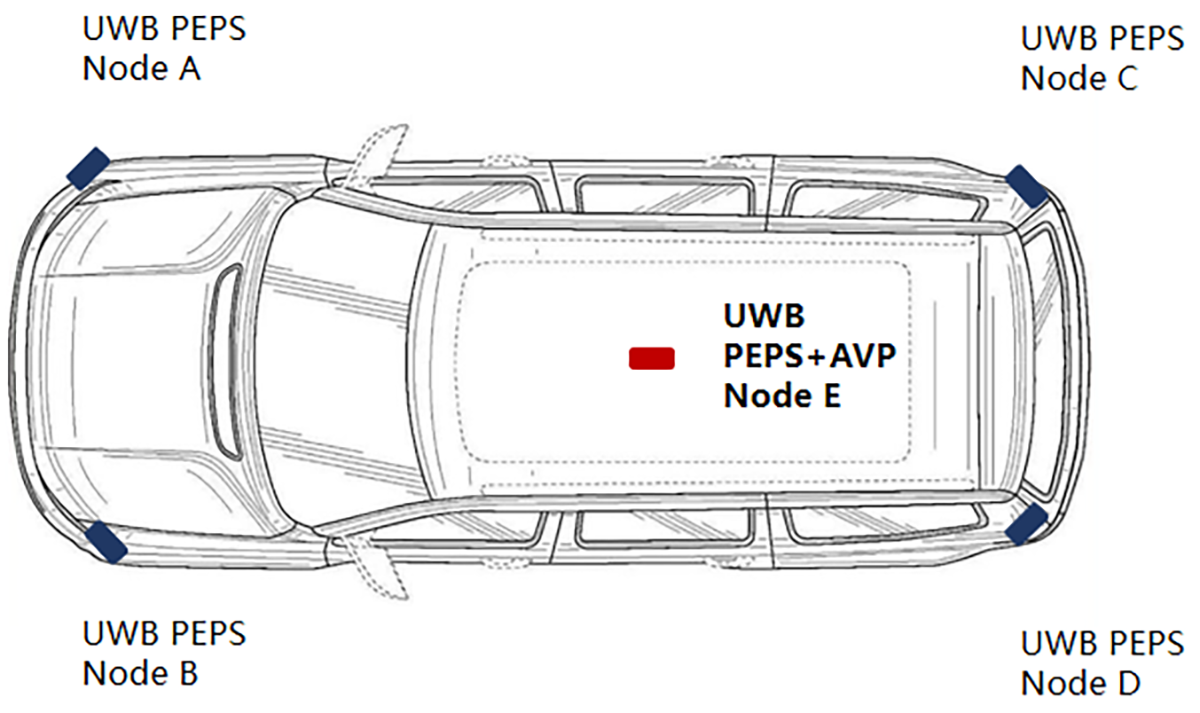
Hình 12 Kiến trúc của PEPS + AVP
Trong chế độ PEPS, nút UWB thứ năm hợp tác với bốn nút UWB khác để hoàn thành việc đo vị trí của chìa khóa thông minh và gửi thông tin khác nhau đến bộ điều khiển miền cơ thể (BCM) để hoàn thành việc tính toán vị trí của chìa khóa thông minh. để quyết định việc mở khóa và bắt đầu các thao tác tiếp theo.
Kết luận
Shenzhen HQ: Room 503, Podium Building No. A-12, Shenzhen Bay Science and Technology Ecological Park, Nanshan District, Shenzhen, Guangdong, China, 518063
Chengdu Branch: N2-1604, Global Center, North No. 1700, Tianfu Avenue, Hi-Tech District, Chengdu, Sichuan, China
ĐT : +86 (0)28-86925399
E-mail : info@szrfstar.com
Teams : Sunny Li
Whatsapp : +8618190842785














